
3차원 공간에 대해서(좌표계, 변환, 카메라, 뷰)🎯 game engine/◽ 게임 수학2022. 10. 27. 16:13
Table of Contents
728x90
1) 3차원 좌표계
3차원 공간의 세 기저 축 x,y,z에 대해 x → y → z → x → y 의 순서로 세 축이 순환된다고 생각해보자.
좌표계를 구분하는 방법은 x 에서 y로 가는 방향으로 손을 접었을때 엄지 손가락의 방향이다.

2) 3차원 공간의 변환
크기(Scale:S), 위치(Translation:T), 회전(Rotation:R)
3차원 모델링 행렬곱의 순서는 Matrix = TRS

3) 카메라 공간
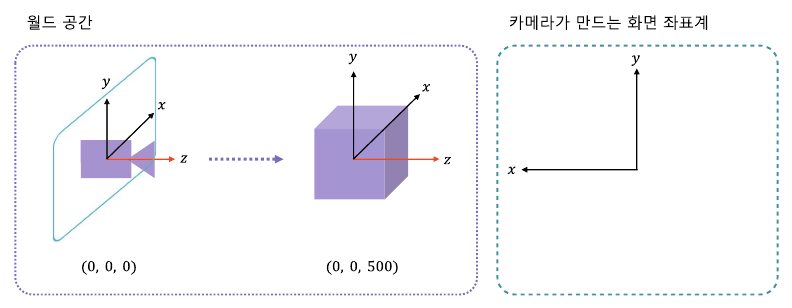

카메라에는 크기의 개념이 없기 때문에, 카메라의 트랜스폼은 크기 변환을 제외한 회전과 이동변환으로만 구성된다. 카메라의 트랜스폼에 저장된 위치 값을 T = (Tx, Ty, Tz)로 저장하고, 로컬 축 값을 각각 X = (Xx, Xy, Xz), Y = (Yx, Yy, Yz), Z = (Zx, Zy, Zz)로 지정해보면,

※ 역행렬은 행렬 곱의 결과가 항등행렬이 나오는 특별한 행렬을 뜻한다.
$$역행렬: A * A^{-1} =A^{-1} * A = I $$
결론: 크기 변환 S를 제외한 카메라의 트랜스폼으로부터 얻어지는 모델링 행렬 M은
$$모델링 행렬: M = T*R, 뷰 행렬: M^{-1} = (T*R)^{-1} = R^{-1}* T^{-1}$$
※ 참고도서와 참고사이트를 확인하시려면 더보기를 눌려주세요
728x90
'🎯 game engine > ◽ 게임 수학' 카테고리의 다른 글
| [게임수학] 원과 각도 (삼각형, 삼각함수.. 부수기) (5) | 2025.03.06 |
|---|---|
| 사원수 (Quaternion/쿼터니언) (0) | 2022.10.27 |
@핑크코냥 :: 핑크코냥
안 하는 것 보다 낫겠지
포스팅이 좋았다면 "좋아요❤️" 또는 "구독👍🏻" 해주세요!
![[게임수학] 원과 각도 (삼각형, 삼각함수.. 부수기)](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FoGIx1%2FbtsMxlXTnnv%2F9lC7CTY018HplEPzN33Ms0%2Fimg.png)
